新吳區智能電動車控制器供應商
功能特性:從基礎控制到智能保護現代電動車控制器已超越傳統調速功能,集成多重保護機制與智能化特性:保護功能欠壓保護:當電池電壓低于設定閾值(如31.5V)時,控制器自動切斷電機供電,防止過放電損壞電池。過流保護:通過限流電路限制比較大輸出電流,避免電機或控制器因大電流燒毀。堵轉保護:檢測電機堵轉狀態,2秒內將電流限制在10A以下,防止繞組過熱。動靜態缺相保護:電機運行中若某相斷線,控制器立即停機,避免燒毀電機。避免控制器進水,洗車或淋雨后要將電動車放在通風處吹干。新吳區智能電動車控制器供應商

很多控制器會在這一環節出丑,如果出現損壞,可以比較兩個控制器成功承受短路的次數,越少越差;拔掉一根電機線,轉把拉到比較大,此時電機不會運轉,快速接通另一根電機線,電機應能立即轉動,電機轉動中反復插拔其中一根電機線,控制器應正常工作。這部分實驗可以驗證控制器軟件、硬件的可靠性設計。5、檢驗控制器效率關閉超速功能,如果有的話,在同一輛車子空載情況下測試不同控制器達到的最高速度,最高速度越高,則效率越高,續航里程也相對高。新吳區應用電動車控制器哪家好按功率劃分:小功率控制器(<500W)主導市場,占比超60%,主要應用于電動自行車。

在傳統的控制單元開發流程中,通常采用串行開發模式,即首先根據應用需要,提出系統需求并進行相應的功能定義,然后進行硬件設計,使用匯編語言或C語言進行面向硬件的代碼編寫,隨后完成軟硬件和外部接口集成,***對系統進行測試標定。整車控制器,尤其是純電動車控制器,其整車控制器研發多采用V模式開發流程。軟硬件技術的不斷發展,為并行開發提供了強有力的工具。第一步,功能定義和離線仿真。首先根據應用需要明確控制器應該具有的功能,為硬件設計提供基礎;然后基礎Matlab建立整個控制系統的仿真模型,并進行離線仿真,運用軟件仿真的方法設計和驗證控制策略。
2、將萬用表設置在直流電壓+20V(DC)檔位,將萬用表黑表筆與紅表筆分別靠在轉把的黑線和紅線上,觀察萬用表讀數是否與標稱電壓相符,它們的上下電壓差不應超過0.2V。3、否則說明控制器內部電源出現故障了,一般有刷控制器可以通過更換三端穩壓集成電路排除故障。 [2]四:當電動車無刷控制器缺相時電動車無刷控制器電源與閘把的故障可以參考有刷控制器的故障排除方法先予排除,對無刷控制器而言,還有其特有故障現象,比如缺相。電動車無刷控制器缺相現象可以分為主相位缺相和霍耳缺相兩種情況。電機控制:控制電動機的啟動、停止、加速和減速,確保電動車的平穩行駛。
第二步,快速控制器原型和硬件開發。從控制系統的Matlab仿真模型中取出控制器模型,并且結合dSPACE的物理接口模塊來實現與被控對象的物理連接,然后運用dSPACE提供編譯工具生成可執行程序,并下載到dSPACE中。dSPACE此時作為目標控制器的替代物,可以方便地實現控制參數在線調試和控制邏輯調節。在進行離線仿真和快速控制其原型的同時,根據控制器的功能設計,同步完成硬件的功能分析并進行相應的硬件設計、制作,并且根據軟件仿真的結果對硬件進行完善和修改。集成化設計:將主控芯片、功率器件、保護電路集成于單一模塊,減少體積與成本。江陰智能電動車控制器平臺
當電流過大時,過流保護電路動作,使電機停轉,避免過流給電機和控制器帶來危害。新吳區智能電動車控制器供應商
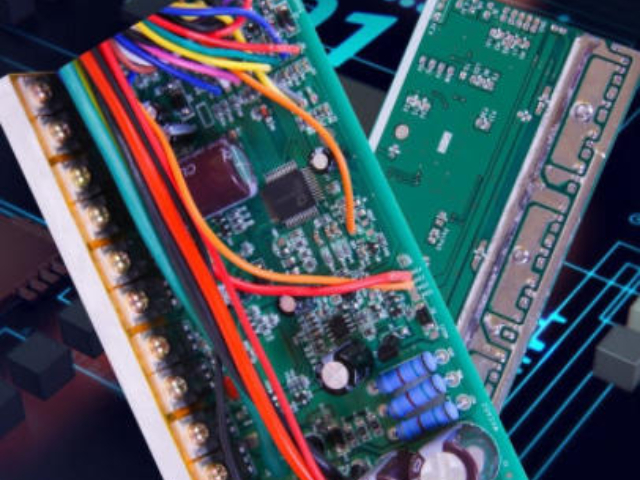
功率主回路采用三相逆變全橋,其中主功率開關器件為IGBT。在大電流、高頻開關狀態下,從電解電容到功率開關模塊的雜散電感對功率回路的能耗、模塊上的尖峰電壓影響較大,因而采用層疊式母線基板使電路的雜散電感盡可能小,以適應控制系統低電壓、大電流工作的特點。電動自行車有很多不起眼,但是很重要的小部件而電動自行車控制器就是其中之一。別看控制器不起眼,但是你的電動自行車的啟動、進退、停止可全靠它了。那么是那些原因能導致電動車控制器的失效呢?新吳區智能電動車控制器供應商
無錫美驅科技有限公司在同行業領域中,一直處在一個不斷銳意進取,不斷制造創新的市場高度,多年以來致力于發展富有創新價值理念的產品標準,在江蘇省等地區的電子元器件中始終保持良好的商業口碑,成績讓我們喜悅,但不會讓我們止步,殘酷的市場磨煉了我們堅強不屈的意志,和諧溫馨的工作環境,富有營養的公司土壤滋養著我們不斷開拓創新,勇于進取的無限潛力,美驅供應攜手大家一起走向共同輝煌的未來,回首過去,我們不會因為取得了一點點成績而沾沾自喜,相反的是面對競爭越來越激烈的市場氛圍,我們更要明確自己的不足,做好迎接新挑戰的準備,要不畏困難,激流勇進,以一個更嶄新的精神面貌迎接大家,共同走向輝煌回來!
- 徐州特點電動車控制器工廠直銷 2025-12-15
- 新吳區標準電動車控制器供應商 2025-12-15
- 江蘇使用電動車控制器設計 2025-12-15
- 宜興特點電動車控制器品牌 2025-12-15
- 梁溪區本地掃地車控制器工廠直銷 2025-12-15
- 蘇州標準鋰電自行車控制器生產廠家 2025-12-14
- 宜興智能鋰電自行車控制器供應商 2025-12-14
- 濱湖區應用電動車控制器專賣店 2025-12-14
- 錫山區智能滑板車控制器哪家好 2025-12-14
- 梁溪區常見掃地車控制器結構設計 2025-12-14
- 湖南地質勘探專業儀器線束定制化生產 2025-12-15
- 徐匯區貿易電子元器件怎么樣 2025-12-15
- 青海國產開關電源廠家電話 2025-12-15
- 無錫PCBsorting第三方 2025-12-15
- 東莞空氣能熱泵物聯網無線通訊哪個牌子好 2025-12-15
- 普陀區高密度腦電設備廠商 2025-12-15
- 中國澳門638nm激光器IntegratedOptics哪家好 2025-12-15
- 黃浦區質量電阻芯片銷售廠 2025-12-15
- 山西自動化電子測量儀器 2025-12-15
- 建鄴區不銹鋼無縫管推薦廠家 2025-12-15