寧夏礦車盲區(qū)防碰撞預(yù)警多少錢
工程車作為基建施工、搶險(xiǎn)救援的 “主力軍”,其作業(yè)環(huán)境往往伴隨著狹窄通道、密集人流、重型設(shè)備交錯(cuò)等特點(diǎn),而車輛自身的高大車身與復(fù)雜結(jié)構(gòu)(如起重機(jī)的吊臂、挖掘機(jī)的鏟斗),進(jìn)一步擴(kuò)大了駕駛員的視覺盲區(qū),成為安全作業(yè)的 “心腹大患”。工程車盲區(qū)防碰撞預(yù)警系統(tǒng)通過融合物聯(lián)網(wǎng)、人工智能與機(jī)器視覺技術(shù),為特種工程車量身打造 “動(dòng)態(tài)安全結(jié)界”,重定義作業(yè)安全標(biāo)準(zhǔn)。系統(tǒng)采用 “多傳感器融合” 方案:除車身四周的 4 顆 210 度超廣角 AI 攝像頭外,還集成了毫米波雷達(dá)與超聲波傳感器。攝像頭負(fù)責(zé)捕捉高清畫面并識(shí)別目標(biāo)類型(行人、車輛、固定障礙物),雷達(dá)則精確測(cè)算目標(biāo)與車輛的實(shí)時(shí)距離及相對(duì)速度,兩者數(shù)據(jù)交叉驗(yàn)證,避免因惡劣天氣(雨、霧、強(qiáng)光)或復(fù)雜背景(粉塵、障礙物遮擋)導(dǎo)致的誤報(bào)、漏報(bào)。例如,在隧道施工中,當(dāng)工人穿著反光衣靠近工程車時(shí),攝像頭優(yōu)先識(shí)別 “人形特征”,雷達(dá)同步確認(rèn)距離小于 2 米,系統(tǒng)立即啟動(dòng)別的預(yù)警 —— 不駕駛室內(nèi)警報(bào)響起,車外安裝的定向揚(yáng)聲器還會(huì)對(duì)目標(biāo)區(qū)域發(fā)出 “請(qǐng)注意,車輛靠近!” 的語(yǔ)音提示,雙向提醒確保安全。車輛防碰撞預(yù)警系統(tǒng)通過4G通信技術(shù),可將預(yù)警信息傳輸至后臺(tái)監(jiān)控中心,方便管理人員及時(shí)掌握車輛狀況。寧夏礦車盲區(qū)防碰撞預(yù)警多少錢

城市渣土車行駛路線復(fù)雜,常經(jīng)過居民區(qū)、工地等區(qū)域,盲區(qū)多,事故率高。佳興偉誠(chéng)的城市渣土車防碰撞預(yù)警系統(tǒng),專為解決這些問題而生。系統(tǒng)在渣土車的車頭、車尾及兩側(cè)安裝多組傳感器,重點(diǎn)監(jiān)測(cè)右側(cè)盲區(qū),因?yàn)檫@里是容易發(fā)生事故的區(qū)域。當(dāng)有行人或非機(jī)動(dòng)車進(jìn)入右側(cè)盲區(qū),駕駛室內(nèi)的右側(cè)警示燈立即亮起,語(yǔ)音播報(bào) “右側(cè)有行人,注意避讓”;若渣土車準(zhǔn)備右轉(zhuǎn),系統(tǒng)會(huì)提前監(jiān)測(cè)范圍,對(duì)可能進(jìn)入轉(zhuǎn)彎軌跡的目標(biāo)發(fā)出預(yù)警。系統(tǒng)還能記錄渣土車的行駛軌跡和預(yù)警信息,便于管理部門監(jiān)管,讓渣土車在城市中安全行駛。拉薩石油工程車防碰撞預(yù)警定制設(shè)計(jì)佳興偉誠(chéng)車輛前向防碰撞預(yù)警,如警惕哨兵,緊盯車輛前方,阻危險(xiǎn)于萌芽。
工程車輛 360 全景盲區(qū)防碰撞預(yù)警系統(tǒng)在保障車輛安全行駛方面發(fā)揮著關(guān)鍵作用,其在多個(gè)方面展現(xiàn)出獨(dú)特的優(yōu)勢(shì)。首先,在安全性能提升方面,該系統(tǒng)效果明顯。據(jù)統(tǒng)計(jì),車輛事故中有相當(dāng)高比例是由于盲區(qū)問題導(dǎo)致的,而該系統(tǒng)的應(yīng)用可大幅降低此類事故率。以工程車輛為例,在安裝了 360 全景盲區(qū)防碰撞預(yù)警系統(tǒng)后,因盲區(qū)引發(fā)的事故率可降低 60% - 80%。這是因?yàn)橄到y(tǒng)通過無(wú)死角的監(jiān)測(cè),讓駕駛員能夠及時(shí)發(fā)現(xiàn)原本處于盲區(qū)的危險(xiǎn)目標(biāo),提前采取制動(dòng)或避讓措施,從而有效避免碰撞事故的發(fā)生,極大地保障了駕駛員、乘客以及周圍行人的生命安全。其次,該系統(tǒng)有助于提高車輛的操作便利性。在一些復(fù)雜的作業(yè)場(chǎng)景中,如建筑施工場(chǎng)地,駕駛員需要頻繁關(guān)注車輛周圍的情況,以確保作業(yè)安全。傳統(tǒng)情況下,駕駛員可能需要頻繁下車查看盲區(qū),或者通過后視鏡進(jìn)行有限角度的觀察,這不效率低下,還存在安全風(fēng)險(xiǎn)。而 360 全景盲區(qū)防碰撞預(yù)警系統(tǒng)通過在駕駛室內(nèi)的顯示屏上提供清晰的車輛周邊全景圖像,駕駛員無(wú)需下車,坐在駕駛座上就能無(wú)死角了解車輛周圍的環(huán)境,快速做出操作決策,減少了操作停頓時(shí)間,提高了作業(yè)效率。
大型車輛因體型龐大、車身結(jié)構(gòu)復(fù)雜,存在的側(cè)方、后方及車頭下方盲區(qū),在公路行駛、廠區(qū)作業(yè)或港口轉(zhuǎn)運(yùn)等場(chǎng)景中,易與行人、小型車輛、作業(yè)設(shè)備發(fā)生碰撞事故。大型車輛盲區(qū)防碰撞預(yù)警系統(tǒng)應(yīng)運(yùn)而生,該系統(tǒng)由分布在車身四周的毫米波雷達(dá)、高清攝像頭、超聲波傳感器,駕駛室內(nèi)的多功能顯示屏及聲光報(bào)警裝置組成,可無(wú)死角實(shí)時(shí)監(jiān)測(cè)盲區(qū)中的移動(dòng)物體和固定障礙物。系統(tǒng)具備精確識(shí)別、動(dòng)態(tài)追蹤與多級(jí)預(yù)警功能,能將盲區(qū)目標(biāo)的距離、速度、類型等信息在顯示屏上清晰呈現(xiàn)并同步更;當(dāng)目標(biāo)處于安全預(yù)警范圍時(shí),觸發(fā)一級(jí)預(yù)警,對(duì)應(yīng)盲區(qū)方向的車身警示燈亮起黃色燈光,同時(shí)語(yǔ)音播報(bào) “盲區(qū)有物體,請(qǐng)注意”;若目標(biāo)進(jìn)入危險(xiǎn)范圍,立即啟動(dòng)二級(jí)預(yù)警,警示燈變?yōu)榧t色并高頻閃爍,語(yǔ)音急促提醒 “盲區(qū)危險(xiǎn),立即停車”,部分系統(tǒng)還會(huì)聯(lián)動(dòng)車輛制動(dòng)系統(tǒng)施加輕微剎車阻力,多維度保障大型車輛作業(yè)與行駛安全。工程車防碰撞預(yù)警系統(tǒng)通過實(shí)時(shí)顯示車輛與障礙物的距離,讓司機(jī)直觀了解當(dāng)前安全狀況。
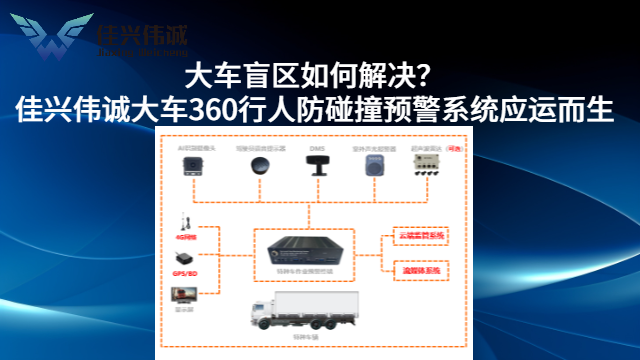
由于工程車屬于大型車輛,具有車身長(zhǎng),駕駛位置高,軸距大等特點(diǎn),車身周圍存在大片視覺盲區(qū)。工程車在作業(yè)過程中,單憑駕駛員視覺操作,那這些由車身引起的盲區(qū)就極大發(fā)生危險(xiǎn)事故,在調(diào)查過程中顯示,很多事故造成大多是因?yàn)椋苓呠囕v人員不知不覺走進(jìn)工程車盲區(qū)范圍內(nèi)駕駛員看不到而引發(fā),為此佳興偉誠(chéng)科技研發(fā)出工程車四路BSD盲區(qū)防碰撞預(yù)警系統(tǒng)。工程車四路BSD盲區(qū)防碰撞預(yù)警系統(tǒng),通過在工程車車身周圍各加裝一個(gè)BSD盲區(qū)偵測(cè)攝像頭來(lái)監(jiān)測(cè)車身周圍的環(huán)境,經(jīng)過算法處理終在司機(jī)駕駛室內(nèi)中控屏上呈現(xiàn)出一個(gè)四分割畫面,司機(jī)可以清楚地看到工程車車身周邊情況,完美的解決因工程車盲區(qū)問題。當(dāng)工程車在作業(yè)時(shí),車身周邊作業(yè)范圍闖入車輛或人員,攝像頭會(huì)立即捕捉闖入人員或車輛的位置,上報(bào)給主機(jī),主機(jī)聯(lián)動(dòng)聲光報(bào)警器立即播報(bào)“您已進(jìn)入危險(xiǎn)區(qū)域,請(qǐng)立即遠(yuǎn)離”,司機(jī)也可以在中控屏上清晰看到闖入人員或車輛位置,避免操作不當(dāng)而造成危險(xiǎn)事故。工程車前向防碰撞預(yù)警系統(tǒng),助力每次作業(yè)安全。拉薩石油工程車防碰撞預(yù)警定制設(shè)計(jì)
依靠人工智能技術(shù)的工程車防碰撞預(yù)警系統(tǒng),能不斷學(xué)習(xí)和適應(yīng)新的駕駛場(chǎng)景,持續(xù)提升預(yù)警性能。寧夏礦車盲區(qū)防碰撞預(yù)警多少錢
隨著交通環(huán)境的日益復(fù)雜,車輛 360 全景盲區(qū)防碰撞預(yù)警系統(tǒng)的重要性愈發(fā)凸顯。它為各類車輛提供了無(wú)死角的安全防護(hù),在多個(gè)關(guān)鍵領(lǐng)域發(fā)揮著不可替代的作用。從系統(tǒng)構(gòu)成來(lái)看,感知層是其基礎(chǔ)。以高清攝像頭為例,在車輛周身合理布局多個(gè)高清攝像頭,它們猶如車輛的 “眼睛”,敏銳地捕捉周圍環(huán)境信息。這些攝像頭的超廣角設(shè)計(jì),確保了對(duì)車身周圍大面積盲區(qū)的有效覆蓋。無(wú)論是在白天的強(qiáng)光下,還是夜晚的黑暗環(huán)境中,都能清晰成像。搭配的毫米波雷達(dá)或超聲波雷達(dá),更是為系統(tǒng)在惡劣天氣條件下的正常運(yùn)行提供了保障。在雨霧彌漫時(shí),雷達(dá)能夠憑借其獨(dú)特的測(cè)距原理,精確感知障礙物的位置,與攝像頭數(shù)據(jù)相互補(bǔ)充,實(shí)現(xiàn)更無(wú)死角、準(zhǔn)確的環(huán)境感知。寧夏礦車盲區(qū)防碰撞預(yù)警多少錢
- 西安北斗5G防碰撞預(yù)警哪家好 2025-12-12
- 寧夏礦車盲區(qū)防碰撞預(yù)警多少錢 2025-12-12
- 昌都車輛北斗5G定位找哪家 2025-12-11
- 阿克蘇汽車防撞防碰撞預(yù)警多少錢 2025-12-11
- 臨夏北斗5G防碰撞預(yù)警定制設(shè)計(jì) 2025-12-11
- 煙臺(tái)北斗5G定位價(jià)格 2025-12-11
- 晉城360全景方案 2025-12-11
- 安順車輛北斗5G定位多少錢 2025-12-11
- 吐魯番大型車輛盲區(qū)防碰撞預(yù)警設(shè)計(jì) 2025-12-10
- 新鄉(xiāng)北斗5G防碰撞預(yù)警 2025-12-10
- 西藏車間客流統(tǒng)計(jì)監(jiān)控 2025-12-12
- CMJS18-2-MY型自動(dòng)滅火系統(tǒng)聯(lián)系方式 2025-12-12
- 崇明區(qū)國(guó)內(nèi)云客服供應(yīng) 2025-12-12
- 云計(jì)算圖書館24 小時(shí)無(wú)人值守 2025-12-12
- UID門禁卡生產(chǎn)廠家 2025-12-12
- 白銀防塵面罩面具型號(hào) 2025-12-12
- 通用智能輔助駕駛供應(yīng) 2025-12-12
- 對(duì)設(shè)備無(wú)損害滅火裝置現(xiàn)貨 2025-12-12
- 陜西推薦FW-C101濾毒盒常用知識(shí) 2025-12-12
- 鎮(zhèn)江保安哪家好 2025-12-12