吐魯番大型車輛盲區(qū)防碰撞預(yù)警設(shè)計(jì)
環(huán)衛(wèi)車在城市道路上作業(yè),清掃、清運(yùn)時(shí)常常需要停靠路邊,周圍行人、非機(jī)動(dòng)車穿梭,環(huán)境復(fù)雜。佳興偉誠(chéng)的環(huán)衛(wèi)車防碰撞預(yù)警系統(tǒng),為環(huán)衛(wèi)工的安全保駕護(hù)航。系統(tǒng)在環(huán)衛(wèi)車的清掃裝置兩側(cè)、車尾及駕駛室側(cè)方安裝傳感器,能監(jiān)測(cè) 3 米至 10 米范圍內(nèi)的目標(biāo)。當(dāng)有行人靠近正在作業(yè)的清掃裝置,系統(tǒng)會(huì)發(fā)出 “作業(yè)區(qū)域有行人,請(qǐng)注意” 的語(yǔ)音預(yù)警;當(dāng)環(huán)衛(wèi)車停靠路邊準(zhǔn)備清運(yùn)垃圾時(shí),若有非機(jī)動(dòng)車從后方駛來(lái),車尾的雷達(dá)會(huì)及時(shí)探測(cè)到,駕駛室內(nèi)的報(bào)警燈亮起,同時(shí)語(yǔ)音提醒 “后方有車輛靠近,注意開(kāi)門安全”。該系統(tǒng)還具備夜間模式,在光線不足時(shí)仍能精確識(shí)別目標(biāo),讓環(huán)衛(wèi)作業(yè)全天候安全無(wú)憂。佳興偉誠(chéng)礦山車輛盲區(qū)防碰撞預(yù)警系統(tǒng)。吐魯番大型車輛盲區(qū)防碰撞預(yù)警設(shè)計(jì)
工程車在作業(yè)時(shí),盲區(qū)是個(gè)棘手難題。像自卸車車尾 4 米范圍內(nèi),裝載機(jī)鏟斗前方 2 米區(qū)域,常因視線受阻,成為事故高發(fā)地。佳興偉誠(chéng) 360 全景防碰撞預(yù)警系統(tǒng)強(qiáng)勢(shì)出擊,化解這一危機(jī)。?系統(tǒng)在車身四周巧妙安裝 4 個(gè)高清超廣角攝像頭,能以 210° 的超大視角,捕捉車輛周邊動(dòng)態(tài)。無(wú)論是狹窄工地的轉(zhuǎn)彎處,還是礦區(qū)復(fù)雜路況,都能無(wú)死角覆蓋。一旦有行人、車輛或障礙物進(jìn)入危險(xiǎn)區(qū)域,系統(tǒng)瞬間反應(yīng),0.1 秒內(nèi)觸發(fā)車內(nèi)顯示屏上的醒目警示圖標(biāo),同時(shí)發(fā)出尖銳蜂鳴聲,駕駛員能迅速察覺(jué),及時(shí)制動(dòng)或轉(zhuǎn)向,讓盲區(qū)不再成為事故的 “溫床” 。新鄉(xiāng)防碰撞預(yù)警哪家好防碰撞預(yù)警系統(tǒng)實(shí)時(shí)監(jiān)測(cè)盲區(qū),結(jié)合攝像頭識(shí)別目標(biāo),聲光提醒駕駛員,減少因視線受阻引發(fā)的碰撞事故。

礦山作為一個(gè)高危行業(yè),其安全問(wèn)題一直備受關(guān)注。而在礦山生產(chǎn)中,部分露天礦區(qū)環(huán)境惡劣,飛沙很大,礦車運(yùn)輸車隊(duì)前后車距看不清,所以礦山車輛的防碰撞問(wèn)題尤為突出。因此,礦山車輛前向防碰撞預(yù)警系統(tǒng)的應(yīng)用顯得尤為重要。佳興偉誠(chéng)科技針對(duì)此現(xiàn)象研發(fā)出礦山車輛前向防碰撞預(yù)警,此系統(tǒng)通過(guò)超聲波雷達(dá)對(duì)前方的障礙物進(jìn)行實(shí)時(shí)監(jiān)測(cè),當(dāng)發(fā)現(xiàn)有障礙物時(shí),及時(shí)向駕駛員發(fā)出語(yǔ)音警報(bào)。提醒駕駛員降低車速?gòu)亩鴣?lái)避免車距過(guò)近發(fā)生碰撞。相比傳統(tǒng)的防碰撞手段,礦山車輛前向防碰撞預(yù)警系統(tǒng)具有響應(yīng)速度快、準(zhǔn)確度高等優(yōu)點(diǎn),能夠更好地保障礦山運(yùn)輸車輛安全!
混凝土攪拌車因罐體旋轉(zhuǎn)、重心偏高,行駛和卸料時(shí)的碰撞風(fēng)險(xiǎn)遠(yuǎn)超普通車輛。佳興偉誠(chéng)的混凝土攪拌車防碰撞預(yù)警系統(tǒng),針對(duì)這些特點(diǎn)量身打造。系統(tǒng)在罐體兩側(cè)、車頭及車尾部署雷達(dá)和攝像頭,不能監(jiān)測(cè)車輛周圍的移動(dòng)物體,還能通過(guò)算法預(yù)判罐體旋轉(zhuǎn)時(shí)可能觸及的范圍。行駛中,若與前車距離過(guò)近,系統(tǒng)會(huì)發(fā)出 “保持安全車距” 的預(yù)警;卸料時(shí),當(dāng)有人員或設(shè)備進(jìn)入罐體旋轉(zhuǎn)半徑,駕駛室內(nèi)的聲光報(bào)警裝置會(huì)立即啟動(dòng),紅色警示燈頻閃,同時(shí)語(yǔ)音播報(bào) “卸料區(qū)域有危險(xiǎn),請(qǐng)勿靠近”。大型車輛防碰撞預(yù)警系統(tǒng)采用高清攝像頭,能清晰捕捉車輛周圍圖像,為司機(jī)提供更直觀的視覺(jué)預(yù)警。
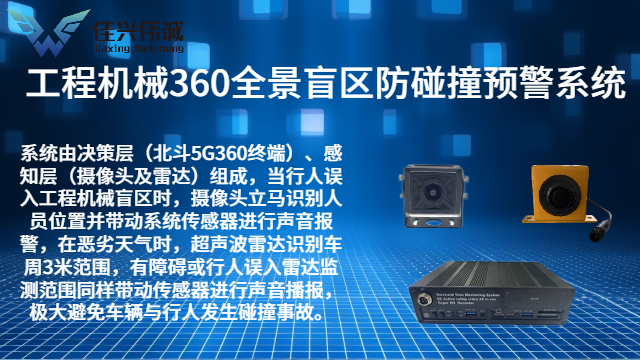
佳興偉誠(chéng) 360 度全景防碰撞預(yù)警系統(tǒng)(又稱車輛環(huán)視系統(tǒng)),工作原理是通過(guò)車輛前后左右的四枚超廣角鏡頭采集實(shí)時(shí)影像,經(jīng)圖像處理單元處理后,在中控屏幕形成實(shí)時(shí)完整的 360 度全景俯視鳥(niǎo)瞰圖。4 個(gè)攝像頭還帶算法,可監(jiān)測(cè)四周行人及車輛,當(dāng)有靠近時(shí)會(huì)報(bào)警并在中控屏圈出其位置,能大幅減少車輛周邊盲區(qū)。該系統(tǒng)集成了北斗定位、5G/4G 視頻傳輸、CAN 通訊,以及 BSD(盲區(qū)監(jiān)測(cè)預(yù)警)、DSM(疲勞駕駛 + 行為檢測(cè))、ADSA(車道偏離)、聲光警報(bào)等傳感器,通過(guò)自有算法結(jié)合影像(被動(dòng)安全)與傳感器(主動(dòng)安全),實(shí)現(xiàn)特種車 360 度無(wú)死角主動(dòng)行車安全輔助。其中,ADAS 實(shí)時(shí)監(jiān)控車輛與車道相對(duì)位置,偏離時(shí)報(bào)警;BSD 監(jiān)控后視鏡盲區(qū),對(duì)區(qū)域內(nèi)移動(dòng)物體探測(cè)并按等級(jí)報(bào)警,支持多種檢測(cè)類型;DSM 通過(guò) AI 視頻分析實(shí)時(shí)監(jiān)控駕駛員行為,不良時(shí)觸發(fā)報(bào)警并上傳相關(guān)視頻圖片。該系統(tǒng)在排除大車盲區(qū),以及路面狹窄、車流量大、障礙物多、行人橫穿、司機(jī)疲勞駕駛等場(chǎng)景中,能極大幫助避免危險(xiǎn),在安全輔助方面實(shí)用價(jià)值明顯。工程車盲區(qū) BSD 防碰撞預(yù)警系統(tǒng)是保障工程作業(yè)安全的關(guān)鍵技術(shù)。西安汽車防撞防碰撞預(yù)警定制
礦車前向防碰撞預(yù)警系統(tǒng)通過(guò)技術(shù)手段彌補(bǔ)了人工駕駛的不足,是礦山安全生產(chǎn)的重要保障。吐魯番大型車輛盲區(qū)防碰撞預(yù)警設(shè)計(jì)
在實(shí)際應(yīng)用場(chǎng)景中,車輛 360 全景盲區(qū)防碰撞預(yù)警系統(tǒng)表現(xiàn)出色。在建筑施工場(chǎng)地,挖掘機(jī)作業(yè)時(shí),它可以監(jiān)測(cè)車身兩側(cè)及后方的施工人員,防止在回轉(zhuǎn)過(guò)程中發(fā)生碰撞;起重機(jī)吊裝作業(yè)時(shí),能避免吊臂下方或配重盲區(qū)的人員進(jìn)入危險(xiǎn)區(qū)域。在礦山與礦區(qū),大型自卸車在狹窄道路轉(zhuǎn)彎、倒車時(shí),系統(tǒng)能夠檢測(cè)周邊的礦車、行人或落石,保障運(yùn)輸安全。在市政工程中,渣土車在城市道路行駛時(shí),可重點(diǎn)監(jiān)測(cè)右側(cè)盲區(qū)(該區(qū)域易發(fā)生行人事故);壓路機(jī)作業(yè)時(shí),能避免碾壓周邊養(yǎng)護(hù)人員。在港口與物流園區(qū),集裝箱卡車、叉車在裝卸區(qū)域,系統(tǒng)能夠精確識(shí)別周邊的搬運(yùn)人員或堆垛障礙物,提高作業(yè)安全性。車輛 360 全景盲區(qū)防碰撞預(yù)警系統(tǒng)憑借其優(yōu)越的技術(shù)優(yōu)勢(shì)和的應(yīng)用場(chǎng)景適應(yīng)性,為車輛的安全行駛保駕護(hù)航,成為現(xiàn)代交通中不可或缺的安全保障系統(tǒng)。吐魯番大型車輛盲區(qū)防碰撞預(yù)警設(shè)計(jì)
- 吐魯番大型車輛盲區(qū)防碰撞預(yù)警設(shè)計(jì) 2025-12-10
- 新鄉(xiāng)北斗5G防碰撞預(yù)警 2025-12-10
- 貴陽(yáng)消防車北斗5G定位服務(wù)商 2025-12-10
- 齊齊哈爾石油工程車防碰撞預(yù)警怎么樣 2025-12-10
- 內(nèi)蒙古山區(qū)工程車北斗5G定位終端 2025-12-10
- 北京工程車盲區(qū)防碰撞預(yù)警價(jià)格 2025-12-10
- 銅川礦卡前向防碰撞預(yù)警 2025-12-10
- 阿克蘇路橋工程車防碰撞預(yù)警 2025-12-10
- 青島礦區(qū)北斗5G定位找哪家 2025-12-09
- 臨夏防碰撞預(yù)警多少錢 2025-12-09
- 四川仿木紋欄桿專業(yè)生產(chǎn)廠家 2025-12-11
- 重慶應(yīng)用圖紙加密軟件多少錢 2025-12-11
- 江蘇廚房滅火系統(tǒng)保養(yǎng) 2025-12-11
- 遼寧EX316梯控?cái)U(kuò)展板電梯梯控現(xiàn)貨直發(fā) 2025-12-11
- 2mm安全光柵傳感器抗震型 2025-12-11
- 國(guó)產(chǎn)企業(yè)門禁卡現(xiàn)貨秒發(fā) 2025-12-11
- 衢州保安哪里有 2025-12-11
- 金華亞洲款安全眼鏡哪家好 2025-12-11
- 紅外火焰報(bào)警裝置多少錢 2025-12-11
- 南通環(huán)保防爆燈具生產(chǎn)企業(yè) 2025-12-11