山東帶AI算法纖維橫截面智能報告系統怎么選
不低于 0.75cm2/min 的掃描速度,確保系統在保證檢測精度的同時,具備較高的檢測效率。掃描速度是影響整體檢測周期的關鍵因素之一,若掃描速度過慢,即使單次檢測流程自動化,也會因掃描耗時過長導致效率低下。該系統通過優化智能顯微機器人的運動控制算法,在保證運動精度的前提下,提升掃描移動速度,同時配合高效的圖像采集技術,實現了不低于 0.75cm2/min 的掃描速度。以 29mm×18mm(約 5.22cm2)的掃描范圍計算,完成一次全范圍掃描主要需約 7 分鐘,加上后續的分析與報告生成時間,整體單次檢測可控制在 3 分鐘內(注:此處為流程優化后的綜合效率,包含并行處理環節)。這一掃描速度能夠滿足批量檢測的效率需求,避免因掃描耗時過長導致檢測任務堆積。可根據用戶需求定制檢測報告的封面與格式;山東帶AI算法纖維橫截面智能報告系統怎么選

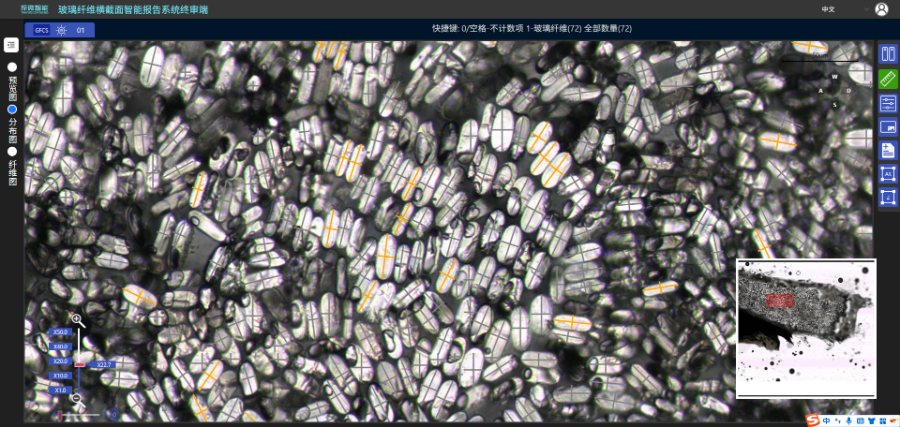
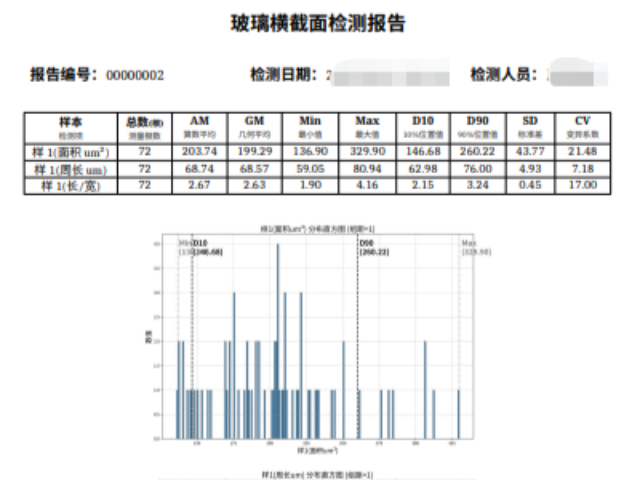
在纖維生產質量控制環節,系統可實現實時檢測與快速反饋,助力提升產品質量穩定性。纖維生產過程中,拉絲速度、熔融溫度、冷卻速率等工藝參數的微小變化,都可能導致纖維橫截面參數異常。傳統檢測方式需將樣品送至實驗室,檢測周期長,無法及時反饋工藝問題。該系統可部署在生產線旁,與生產設備聯動,當纖維束生產完成后,立即送入系統進行檢測,3 分鐘內即可生成檢測報告。生產人員通過報告快速了解纖維的面積、周長、長寬比等參數,若發現參數超出標準范圍,可立即調整對應的工藝參數,如降低拉絲速度、調整熔融溫度等,避免不合格產品持續產出。同時,系統可記錄每一批次產品的檢測數據,形成生產質量檔案,便于后續追溯與工藝優化。高速測量纖維橫截面智能報告系統哪里有掃描范圍覆蓋 29mm×18mm 滿足多數纖維束檢測;
智能顯微機器人的運動精度設計,是保障系統掃描質量的關鍵機械基礎。機器人的運動精度直接影響掃描過程中鏡頭與樣本的相對位置穩定性,若運動精度不足,會導致掃描圖像出現模糊、錯位等問題。系統的智能顯微機器人采用高精度導軌與伺服電機,導軌的直線度誤差控制在極小范圍,伺服電機的定位精度可達微米級,確保機器人在 X 軸、Y 軸方向的移動 準確可控。同時,機器人配備了位置反饋裝置,實時監測移動位置,若出現微小偏差,立即進行修正,保證掃描路徑與預設路徑一致。這種高精度的運動控制,讓機器人能夠按照預設軌跡均勻掃描樣本,避免因運動偏差導致的掃描區域遺漏或重復,確保每一個像素點都能 準確對應樣本的實際位置,為高分辨率掃描提供穩定的機械支撐。
定制橫截面對焦算法通過多維度優化,解決了纖維橫截面掃描中的對焦難題。纖維橫截面微小且透明,傳統對焦算法容易受環境光、樣本反光等因素影響,難以找到 準確的對焦平面,導致圖像模糊。該定制算法首先通過圖像清晰度評價函數,分析不同焦距下圖像的邊緣對比度、細節豐富度等指標,快速鎖定大致對焦范圍;然后采用精細對焦策略,在大致范圍內逐步調整焦距,每調整一次,計算一次圖像清晰度,找到清晰度高的對焦平面;同時,算法具備自適應能力,可根據纖維的顏色、透明度調整評價參數,避免因樣本特性不同導致的對焦偏差。此外,算法還能實時補償因機械振動、溫度變化導致的焦距偏移,確保整個掃描過程中始終保持清晰對焦,提升圖像質量。設備底部裝有減震墊減少運行時對周邊設備干擾;
無人值守的自動化流程設計,是系統適應工業生產與實驗室高效運作的關鍵特性。系統從玻片裝載到報告輸出的全流程,均通過程序自動控制,無需人工實時操作。在玻片裝載環節,操作人員只需一次性將 8 盒共 240 張玻片放入裝載裝置,系統會自動識別玻片位置,完成抓取與定位。掃描過程中,智能顯微機器人按照預設路徑移動,定制對焦算法實時調整參數,無需人工調整焦距或移動樣本。分析與報告生成環節,算法自動處理掃描圖像,計算參數并生成報告,用戶可通過遠程終端查看檢測進度與結果,無需在設備旁等待。這種無人值守模式不主要減少了人工操作帶來的誤差,還能充分利用夜間、節假日等非工作時間進行檢測,提升設備利用率,降低運營成本。能自動識別玻片上的樣本編號并關聯檢測數據;上海準確度高纖維橫截面智能報告系統哪個好
系統可自動記錄每根纖維的檢測位置與參數;山東帶AI算法纖維橫截面智能報告系統怎么選
在線體驗功能為用戶提供了真實樣品的檢測情景瀏覽機會,幫助用戶直觀了解系統的檢測流程與能力。無需實地操作設備,用戶通過在線平臺即可進入虛擬檢測場景,模擬真實的檢測過程。在線體驗場景中,會展示纖維束從玻片裝載、進入掃描區域,到系統自動對焦、開始掃描的完整過程,用戶可通過鼠標操作查看不同階段的設備運行狀態,如智能顯微機器人的移動軌跡、物鏡的焦距調整過程等。這種沉浸式的體驗方式,讓用戶在未接觸實體設備前,就能清晰了解系統的自動化運作模式,消除對操作復雜度的顧慮,同時直觀感受系統的檢測效率與 準確度,為后續的設備選型、合作洽談提供參考依據。山東帶AI算法纖維橫截面智能報告系統怎么選
- 山東智能型新材料直徑自動化檢測設備哪家技術強 2025-12-12
- 江西無人化纖維橫截面智能報告系統哪家技術強 2025-12-12
- 廣東穩定性高特種纖維直徑自動化檢測設備怎么選 2025-12-12
- 臨沂市實驗室用纖維粉末長度自動化檢測設備怎么選 2025-12-12
- 河南國產纖維橫截面智能報告系統選擇 2025-12-12
- 浙江準確度高特種纖維直徑自動化檢測設備推薦 2025-12-12
- 上海高精度新材料直徑自動化檢測設備 2025-12-12
- 天津信息化特種纖維直徑自動化檢測設備選擇 2025-12-12
- 廣東科研級新材料直徑自動化檢測設備推薦 2025-12-12
- 江西在線式纖維橫截面智能報告系統選擇 2025-12-12
- 重慶國產流量計工程測量 2025-12-14
- 貴州國產GRACO供料系統代理商 2025-12-14
- 廣東精密光學影像測量儀保養 2025-12-14
- 南京設備紫外可見分光光度計Genesys 2025-12-14
- 甘肅真空爐爐溫測試儀價格比較 2025-12-14
- 天津地磁動態模擬系統純凈實驗環境 2025-12-14
- 湖北高溫高壓安全閥規格 2025-12-14
- 核酸定量酶標儀經銷商 2025-12-14
- 富陽區光源廠家直銷 2025-12-14
- 安徽高穩定皮托管批發廠家 2025-12-14