蕪湖專機運動控制維修
非標自動化運動控制編程的邏輯設計是確保設備執行復雜動作的基礎,其在于將實際生產需求轉化為可執行的代碼指令,同時兼顧運動精度、響應速度與流程靈活性。在編程前,需先明確設備的運動需求:例如電子元件插件機需實現 “取料 - 定位 - 插件 - 復位” 的循環動作,每個環節需定義軸的運動參數(如速度、加速度、目標位置)與動作時序。以基于 PLC 的編程為例,通常采用 “狀態機” 邏輯設計:將整個運動流程劃分為待機、取料、移動、插件、復位等多個狀態,每個狀態通過條件判斷(如傳感器信號、位置反饋)觸發狀態切換。例如取料狀態中,編程時需先判斷吸嘴是否到達料盤位置(通過 X 軸、Y 軸位置反饋確認),再控制 Z 軸下降(設定速度 50mm/s,加速度 100mm/s2),同時啟動負壓檢測(判斷是否吸到元件),若檢測到負壓達標,則切換至移動狀態;若未達標,則觸發報警狀態。此外,邏輯設計還需考慮異常處理:如運動過程中遇到限位開關觸發,代碼需立即執行急停指令(停止所有軸運動,切斷輸出),并在人機界面顯示故障信息,確保設備安全。這種模塊化的邏輯設計不僅便于后期調試與修改,還能提升代碼的可讀性與可維護性,適應非標設備多品種、小批量的生產需求。寧波車床運動控制廠家。蕪湖專機運動控制維修
以瓶蓋旋蓋設備為例,運動控制器需控制旋蓋頭完成下降、旋轉旋緊、上升等動作,采用 S 型加減速算法規劃旋蓋頭的運動軌跡,可使旋蓋頭在下降過程中從靜止狀態平穩加速,到達瓶蓋位置時減速,避免因沖擊導致瓶蓋變形;在旋轉旋緊階段,通過調整轉速曲線,確保旋緊力矩均勻,提升旋蓋質量。此外,軌跡規劃技術還需與設備的實際負載特性相結合,在規劃過程中充分考慮負載慣性的影響,避免因負載突變導致的運動超調或失步。例如,在搬運重型工件的非標設備中,軌跡規劃需適當降低加速度,延長加速時間,以減少電機的負載沖擊,保護設備部件,確保運動過程的穩定性。寧波包裝運動控制調試杭州點膠運動控制廠家。
無心磨床的運動控制特點聚焦于批量軸類零件的高效磨削,其挑戰是實現工件的穩定支撐與砂輪、導輪的協同運動。無心磨床通過砂輪(切削輪)、導輪(定位輪)與托板共同支撐工件,無需裝夾,適合 φ5-50mm、長度 50-500mm 的軸類零件批量加工(如螺栓、銷軸)。運動控制的關鍵在于:導輪通過變頻電機驅動,以較低轉速(50-200r/min)帶動工件旋轉,同時通過傾斜 2-5° 的安裝角度,推動工件沿軸向勻速進給(進給速度 0.1-1m/min);砂輪則以高速(3000-8000r/min)旋轉完成切削。為保證工件直徑精度,系統需實時調整導輪轉速與砂輪進給量 —— 例如加工 φ20mm 的 45 鋼銷軸時,導輪轉速 100r/min、傾斜 3°,使工件軸向進給速度 0.3m/min,砂輪每批次進給 0.01mm,經過 3 次磨削循環后,工件直徑公差控制在 ±0.002mm 以內。此外,無心磨床還需通過 “工件圓度監控” 技術:在出料端安裝激光測徑儀,實時測量工件直徑,若發現超差(如超過 ±0.003mm),立即調整砂輪進給量或導輪轉速,確保批量加工的一致性,廢品率可控制在 0.1% 以下。
車床運動控制中的 PLC 邏輯控制是實現設備整體自動化的紐帶,負責協調主軸、進給軸、送料機、冷卻系統等各部件的動作時序,確保加工流程有序進行。PLC(可編程邏輯控制器)在車床中的功能包括:加工前的設備自檢(如主軸是否夾緊、刀具是否到位、潤滑系統是否正常)、加工過程中的輔助動作控制(如冷卻泵啟停、切屑輸送器啟停)、加工后的工件卸料控制等。例如在批量加工盤類零件時,PLC 的控制流程如下:① 送料機將工件送至主軸卡盤 → ② 卡盤夾緊工件 → ③ PLC 發送信號至數控系統,啟動加工程序 → ④ 加工過程中,根據切削工況啟停冷卻泵 → ⑤ 加工完成后,主軸停止旋轉 → ⑥ 卡盤松開,卸料機械手將工件取走 → ⑦ 系統返回初始狀態,準備下一次加工。此外,PLC 還具備故障診斷功能,通過采集各傳感器(如溫度傳感器、壓力傳感器)的信號,判斷設備是否存在故障(如冷卻不足、卡盤壓力過低),并在人機界面上顯示故障代碼,便于操作人員快速排查。滁州石墨運動控制廠家。

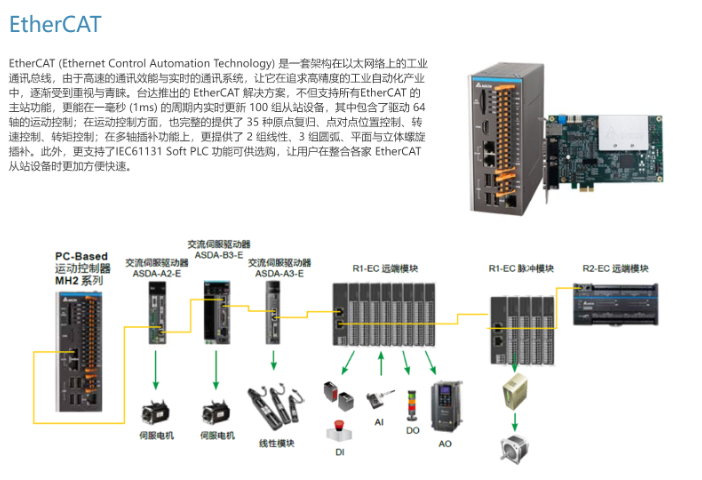
伺服驅動技術作為非標自動化運動控制的執行單元,其性能升級對設備整體運行效果的提升具有重要意義。在傳統的非標自動化設備中,伺服系統多采用模擬量控制方式,存在控制精度低、抗干擾能力弱等問題,難以滿足高精度加工場景的需求。隨著數字化技術的發展,現代非標自動化運動控制中的伺服驅動已轉向數字控制模式,通過以太網、脈沖等數字通信方式實現運動控制器與伺服驅動器之間的高速數據傳輸,數據傳輸速率可達 Mbps 級別,大幅降低了信號傳輸過程中的干擾與延遲。以汽車零部件焊接自動化設備為例,焊接機器人的每個關節均配備高精度伺服電機,運動控制器通過數字信號向各伺服驅動器發送位置、速度指令,伺服驅動器實時反饋電機運行狀態,形成閉環控制。這種控制方式不僅能實現焊接軌跡的復刻,還能根據焊接過程中的電流、電壓變化實時調整電機轉速,確保焊接熔深均勻,提升焊接質量。此外,現代伺服驅動系統還具備參數自整定功能,在設備調試階段,系統可自動檢測負載慣性、機械阻尼等參數,并優化控制算法,縮短調試周期,降低非標設備的開發成本。安徽石墨運動控制廠家。蕪湖專機運動控制維修
杭州專機運動控制廠家。蕪湖專機運動控制維修
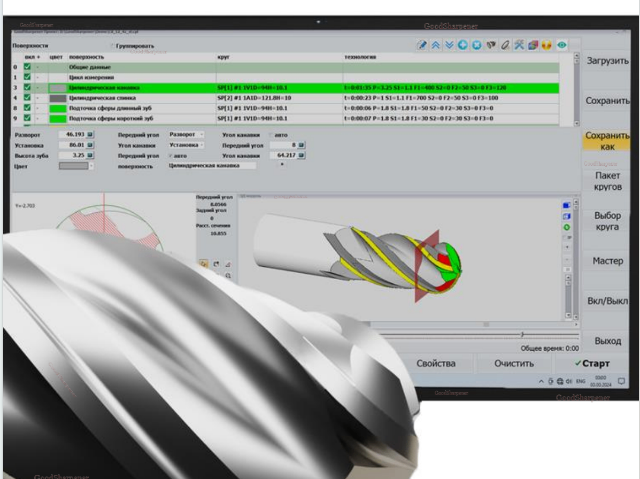
工具磨床的多軸聯動控制技術是實現復雜刀具磨削的關鍵,尤其在銑刀、鉆頭等刃具加工中不可或缺。工具磨床通常需實現 X、Y、Z 三個線性軸與 A、C 兩個旋轉軸的五軸聯動,以磨削刀具的螺旋槽、后刀面、刃口等復雜結構。例如加工 φ10mm 的高速鋼立銑刀時,C 軸控制工件旋轉(實現螺旋槽分度),A 軸控制工件傾斜(調整后刀面角度),X、Y、Z 軸協同控制砂輪軌跡,確保螺旋槽導程精度(誤差≤0.01mm)與后刀面角度精度(誤差≤0.5°)。為保證五軸聯動的同步性,系統采用高速運動控制器(運算周期≤0.5ms),通過 EtherCAT 工業總線實現各軸數據傳輸(傳輸速率 100Mbps),同時配備光柵尺(分辨率 0.1μm)與圓光柵(分辨率 1 角秒)實現位置反饋,確保砂輪軌跡與刀具三維模型的偏差≤0.002mm。在實際加工中,還需配合 CAM 軟件(如 UG CAM、EdgeCAM)生成磨削代碼,將刀具的螺旋槽、刃口等特征離散為微小運動段,再由數控系統解析為各軸運動指令,終實現一次裝夾完成銑刀的全尺寸磨削,相比傳統分步磨削,效率提升 40% 以上,刃口粗糙度可達 Ra0.2μm。蕪湖專機運動控制維修
- 連云港銑床數控系統編程 2025-12-24
- 鹽城數控系統廠家 2025-12-24
- 徐州數控系統開發 2025-12-24
- 江蘇磨床數控系統定制 2025-12-24
- 蘇州點膠數控系統 2025-12-24
- 蘇州復合材料數控系統維修 2025-12-23
- 常州美發刀數控系統開發 2025-12-23
- 銑床數控系統維修 2025-12-23
- 淮安點膠數控系統廠家 2025-12-23
- 鎮江絲網印刷數控系統 2025-12-23
- 湛江釹鐵硼多少錢 2025-12-24
- BSS84MOS定制 2025-12-24
- 江西多點測量薄膜壓力傳感器費用 2025-12-24
- 內蒙古2606 AB灌封膠廠家供應 2025-12-24
- 閔行區質量整流橋圖片 2025-12-24
- 彩虹自動復位溫控器1688 2025-12-24
- 佛山防靜電ESD二極管哪里有賣 2025-12-24
- 河南可焊接NPN型晶體三極管消費電子電路應用采購 2025-12-24
- 安徽工業制造薄膜壓力傳感器售后服務 2025-12-24
- 廣東騎乘式割草機開關設計 2025-12-24