江西省時省力目標識別供應商
在吊運鋼卷時想要實現AI識別就需要圖像處理器件的介入,這些圖像處理器件在定制化AI算法的輔助作用下,就能夠對鋼卷等特定物體進行精細化分類識別。像成都慧視開發的高性能AI圖像處理板RK3588,能夠輸出6.0TOPS的算力,并能夠實現國產化零器件替代。我司能夠根據前端攝像機定制接口,實現和相機的快速結合,用戶可以使用自身的吊鉤跟蹤算法或者由我司定制算法,實現穩定跟蹤吊鉤。通過高清攝像頭和慧視AI圖像處理板的結合,既能實現安全生產,又能提升鋼卷調度的效率。全國產化的目標識別AI模塊。江西省時省力目標識別供應商
目標識別
在Viztra-HE030系列圖像處理板的定制當中,曾遇到一客戶對帶寬有嚴格要求,需要我們對整體進入圖像處理板的視頻碼率進行限制。但是在實際操作中,客戶發現我們rtsp輸出的視頻流的碼率超過了他們的帶寬限制,這就導致視頻花屏,經過技術的多方排查發現,整體帶寬并沒有超出限制,花屏的主要原因是每幀視頻發送的瞬時帶寬超過了客戶的限制。于是經過技術協商,慧視軟件工程師通過對live555網絡推流庫的改寫,將視頻幀的發送拆分成多個包間隔發送,保證整體發送時間在幀間隔之內,以此實現數據的平滑發送。從而快速解決了客戶的痛點。上海人防目標識別編號慧視光電的目標識別圖像處理板有自適應識別框嗎?
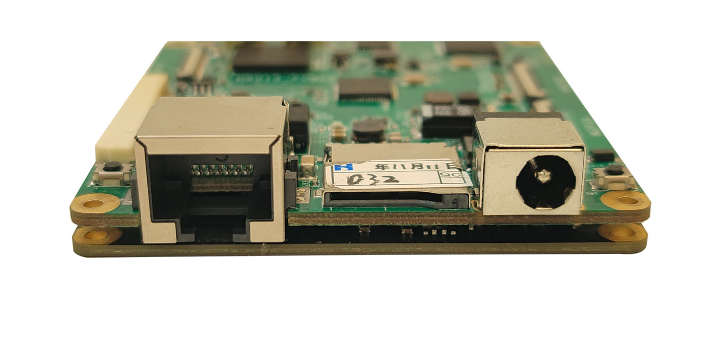
我司貨架產品Viztra-LE034C可接兩路視頻輸入,分別為SDI和CVBS,由于CVBS解碼IC芯片不支持熱插拔功能,固默認不支持熱插拔功能。該產品交付客戶后,部分客戶存在熱插拔的需求,向我司反饋熱插拔后CVBS視頻花屏嚴重,且無法自動恢復,必須對板卡斷電重啟才能恢復正常圖像,嚴重影響客戶使用,希望我司能實現熱插拔功能。我司收到反饋后積極響應,通過調試發現CVBS斷開后解碼IC仍然輸出純黑屏信號,與原廠溝通也未取得實質解決方案。通過讀取解碼IC的狀態寄存器來判斷是否斷開視頻輸入,發現該狀態寄存器存在誤報現象,無法準確定位是否斷開了視頻信號。為了徹底解決該問題我司決定開發黑屏檢測算法,先校驗解碼IC狀態寄存器,判定為無視頻輸入后再使用黑屏檢測算法來屏蔽狀態寄存器的誤報,從而準確的判斷視頻輸入信號是否斷開。當重新接入視頻信號后復位解碼IC保證畫面正常,無花屏等異常情況。
戶外探險已是當下一個時興的運動,但是這種運動帶來了一個問題,那就是救援。當探險者迷失在山林間,會給救援造成許多困難,復雜的地形阻擋了被困者也阻擋著救援團隊,而探險者可能處于失去聯絡的狀態,救援團隊則不知道被困位置。在崇山峻嶺間,救援就是在和死神賽跑,對于救援團隊救援技術都有著高要求。傳統的人工搜索效率低下,顯然不能滿足救援需求,無人機的應用則和人工救援形成了一定的互補。無人機機動靈活的特點,可以搜尋人工難以抵達的區域,同時無人機升空的視野更廣闊看得更遠,即便是在夜間,搭載紅外傳感器的無人機也能夠進行高效工作。而這之中,圖像算法則能夠賦能AI搜救,通過定制算法,能夠快速排查、定位目標人員位置,在大范圍遠距離的觀察者有時候比人眼好使。DVP接口的圖像處理板哪里有?
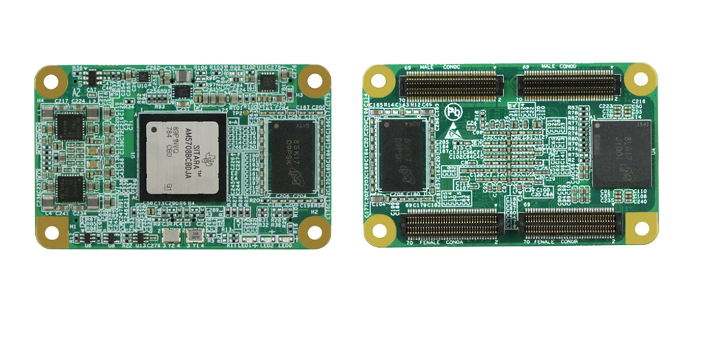
不久前有工程師成功在RK3588上部署了DeepSeek,但也只是跑起來了DeepSeekR1(Qwen21.5B)模型。1.5B什么概念,也就能處理處理輕量級的文字任務,而且也不能做到快速實時響應。除了算力問題,模型的移植也是難點,很多網絡層,瑞芯微的平臺并不支持。但這至少表明,在RK3588上運行DeepSeek是能夠實現的,只是被自身硬件所限制。如果在RK3588圖像處理板的基礎上外接高算力模塊,打造一個更高算力的RK3588圖像處理板,理論上就能實現DeepSeek高參數模型的應用。目前這個方向,我們整個團隊也在深入研究,相信很快就會有結果。無人機識別的AI模塊。上海可靠目標識別辦公軟件
鳥類識別的模塊定制。江西省時省力目標識別供應商
無人機技術及應用范圍的不斷發展,使得無人機的反制也成為大家關注的話題,一項先進的技術,對你有利對別人也有利,在進攻端如果大家旗鼓相當,那就得在反制端下功夫,誰的反制能力更強,越能保護空域安全。各種五花八門的無人機反制技術都得到了應用驗證,它們各有優缺點,還能形成一定的優勢互補。采用無人機反制無人機的方法能夠實現效益比較大化,將AI圖像處理板安裝在己方無人機中,就能夠實現對侵入無人機的AI識別追蹤,為迫降、撞擊等制造條件。江西省時省力目標識別供應商
- 四川雙光成像圖像識別模塊板卡 2025-12-16
- 貴州RV1126開發板圖像識別模塊算法研發 2025-12-16
- 云南國產化圖像識別模塊應用 2025-12-16
- 青海國產化目標識別24小時服務 2025-12-16
- 江西RV1126主板圖像識別模塊算法研發 2025-12-16
- 海南國產目標識別供應商 2025-12-16
- 深度學習AI智能視覺 2025-12-16
- 移動目標識別遠程控制 2025-12-16
- 陜西RK3399開發板圖像識別模塊提供商 2025-12-16
- 貴州**級圖像識別模塊方法 2025-12-16
- 廣西耐酸堿網線質量問題 2025-12-16
- 江夏區本地企業智慧管理平臺開發質量 2025-12-16
- 江蘇高清信息系統集成服務商服務熱線 2025-12-16
- 小型無線通信模塊報價 2025-12-16
- 江蘇本地毫米波通信批量定制 2025-12-16
- 徐州電子航道數據無動力車定位系統 2025-12-16
- 重慶曲面屏酒店自助機價位 2025-12-16
- 吳中區國內毫米波測距測速雷達質量 2025-12-16
- 重慶千兆工業交換機價格表 2025-12-16
- 四川雙光成像圖像識別模塊板卡 2025-12-16