常州搬運機器人線性馬達設計
由定子演變而來的一側稱為初級,由轉子演變而來的一側稱為次級。在實際應用時,將初級和次級制造成不同的長度,以保證在所需行程范圍內初級與次級之間的耦合保持不變。線性馬達可以是短初級長次級,也可以是長初級短次級。考慮到制造成本、運行費用,以直線感應電動機為例:當初級繞組通入交流電源時,便在氣隙中產生行波磁場,次級在行波磁場切割下,將感應出電動勢并產生電流,該電流與氣隙中的磁場相作用就產生電磁推力。如果初級固定,則次級在推力作用下做直線運動;反之,則初級做直線運動。線性馬達的驅動控制技術一個線性馬達應用系統不要有性能良好的線性馬達,還必須具有能在安全可靠的條件下實現技術與經濟要求的控制系統。隨著自動控制技術與微計算機技術的發展,線性馬達的控制方法越來越多。線性馬達定制就選蘇州尚恩格!常州搬運機器人線性馬達設計
線性馬達主要應用于三個方面:一是應用于自動控制系統,這類應用場合比較多;其次是作為長期連續運行的驅動電機;三是應用在需要短時間、短距離內提供巨大的直線運動能的裝置中。高速磁懸浮列車磁懸浮列車是線性馬達實際應用的典型的例子,美、英、日、法、德、加拿大等國都在研制直線懸浮列車,其中日本進展快。線性馬達驅動的電梯世界上***臺使用線性馬達驅動的電梯是1990年4月安裝于日本東京都豐島區萬世大樓,該電梯載重600kg,速度為105m/min,提升高度為。由于線性馬達驅動的電梯沒有曳引機組,因而建筑物頂的機房可省略。如果建筑物的高度增至1000米左右,就必須使用無鋼絲繩電梯,這種電梯采用高溫超導技術的線性馬達驅動,線圈裝在井道中,轎廂外裝有高性能永磁材料,就如磁懸浮列車一樣,采用無線電波或光控技術控制。常州搬運機器人線性馬達設計線性馬達選型就找蘇州尚恩格!
圓柱形動磁體線性馬達動子是圓柱形結構。沿固定著磁場的圓柱體運動。這種電機是初發現的商業應用但是不能使用于要求節省空間的平板式和U型槽式線性馬達的場合。圓柱形動磁體線性馬達的磁路與動磁執行器相似。區別在于線圈可以復制以增加行程。典型的線圈繞組是三相組成的,使用霍爾裝置實現無刷換相。推力線圈是圓柱形的,沿磁棒上下運動。這種結構不適合對磁通泄漏敏感的應用。必須小心操作保證手指不卡在磁棒和有吸引力的側面之間。管狀線性馬達設計的一個潛在的問題出現在,當行程增加,由于電機是完全圓柱的而且沿著磁棒上下運動,***的支撐點在兩端。保證磁棒的徑向偏差不至于導致磁體接觸推力線圈的長度總會有限制。
對直線電機控制技術的研究基本上可以分為三個方面:一是傳統控制技術,二是現代控制技術,三是智能控制技術。傳統的控制技術如PID反饋控制、解耦控制等在交流伺服系統中得到了***的應用。其中PID控制蘊涵動態控制過程中的信息,具有較強的魯棒性,是交流伺服電機驅動系統中基本的控制方式。為了提高控制效果,往往采用解耦控制和矢量控制技術。在對象模型確定、不變化且是線性的以及操作條件、運行環境是確定不變的條件下,采用傳統控制技術是簡單有效的。但是在高精度微進給的高性能場合,就必須考慮對象結構與參數的變化。各種非線性的影響,運行環境的改變及環境干擾等時變和不確定因素,才能得到滿意的控制效果。因此,現代控制技術在直線伺服電機控制的研究中引起了很大的重視。常用控制方法有:自適應控制、滑模變結構控制、魯棒控制及智能控制。主要是將模糊邏輯、神經網絡與PID、H∞控制等現有的成熟的控制方法相結合,取長補短,以獲得更好的控制性能。江蘇線性馬達采購就找蘇州尚恩格!
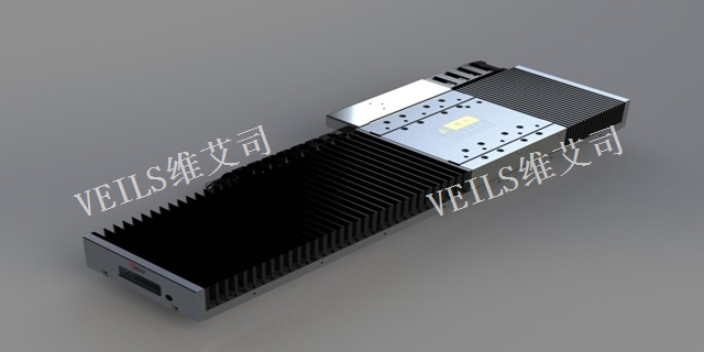
無槽有鐵芯:無槽有鐵芯平板電機結構上和無槽無鐵芯電機相似。除了鐵芯安裝在鋼疊片結構然后再安裝到鋁背板上,鐵疊片結構用在指引磁場和增加推力。磁軌和動子之間產生的吸力和電機產生的推力成正比,疊片結構導致接頭力產生。把動子安裝到磁軌上時必須小心以免他們之間的吸力造成傷害。無槽有鐵芯比無槽無鐵芯電機有更大的推力。有槽有鐵芯:這種類型的線性馬達,鐵心線圈被放進一個鋼結構里以產生鐵芯線圈單元。鐵芯有效增強電機的推力輸出通過聚焦線圈產生的磁場。鐵芯電樞和磁軌之間強大的吸引力可以被預先用作氣浮軸承系統的預加載荷。這些力會增加軸承的磨損,磁鐵的相位差可減少接頭力。線性馬達求購就找蘇州VEILS!無錫自動下料線性馬達報價
U 型槽式線性馬達選型就找蘇州尚恩格!常州搬運機器人線性馬達設計
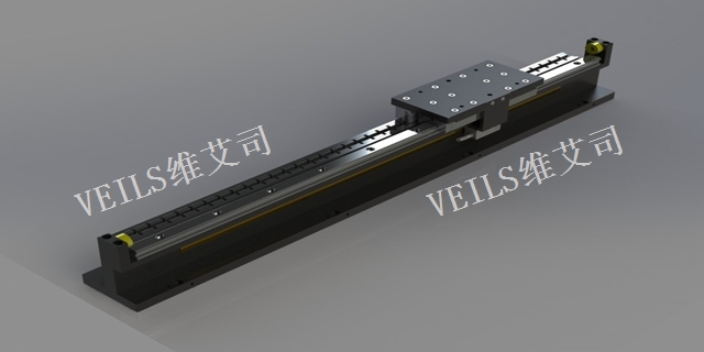
維艾司品牌下的線性馬達分為:U型槽線性馬達,圓筒型線性馬達和平板型線性馬達。管狀線性馬達也稱桿狀線性馬達、棒狀線性馬達、棒狀線性馬達、桿狀線性馬達、管狀線性馬達。管狀線性馬達基本結構是由一個帶內置高能永磁體的不銹鋼軸定子和一個含有精密無鐵芯線圈的滑塊動子組成。由于環形繞組可以實現360的磁力線垂直切割,所以定子的磁通均得到了比較***的利用,實現了在其他線性馬達中不可能實現的高推力密度和***率。得益于其簡單的結構,管狀線性馬達能夠輕松實現100nm的**辨率。常州搬運機器人線性馬達設計
- 江蘇自動下料線性馬達廠家 2025-12-24
- 蘇州搬運線性馬達報價 2025-12-24
- 浙江伺服線性馬達工廠 2025-12-24
- 江蘇沖壓線性模組源頭 2025-12-24
- 安徽非標線性馬達報價 2025-12-24
- 山西沖壓線性馬達價格 2025-12-24
- 山西碼垛線性馬達 2025-12-24
- 上海自動下料線性模組源頭 2025-12-24
- 自動化線性馬達價格 2025-12-24
- 蘇州組裝線性模組組裝 2025-12-24
- 湖南集裝箱移動板房供應商 2025-12-24
- 四川鋁膜復合耐高溫防火布價位 2025-12-24
- 青島鑄然英式槽鋼價格 2025-12-24
- 甘肅哪里風管品牌 2025-12-24
- 無錫科技館水磨石 2025-12-24
- 仿木紋飾面海洋板現貨 2025-12-24
- 浙江雷諾美縫劑行價 2025-12-24
- 寶山區本地住宅景觀服務熱線 2025-12-24
- 立體化住宅裝修行價 2025-12-24
- 青島高科技隔音移動墻設計推薦廠家 2025-12-24